
An Unsupervised Grammar Induction System For Teleoperation
A teleoperation system is basically a dual robot system in which a remote slave robot tracks the motion of a master robot that is commanded by a human operator. A typical telerobotic system is composed of a human operator maneuvering a master robot and a slave robot working on a remote and/or hard to reach environment. Motivated by the large variety of applications, ranging from space explorations to mining, medical applications to nuclear waste decontamination teleoperation have been studied extensively.
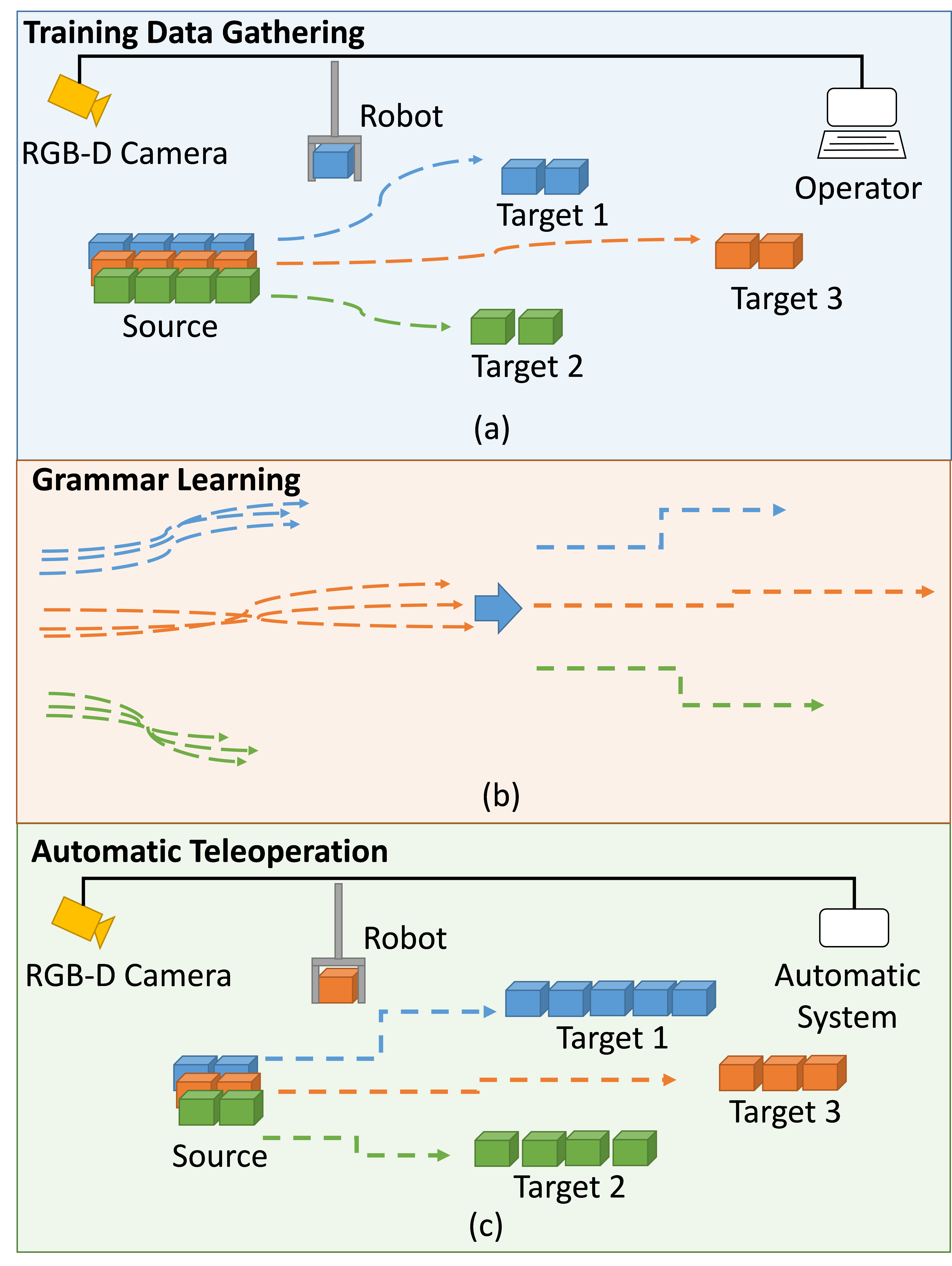
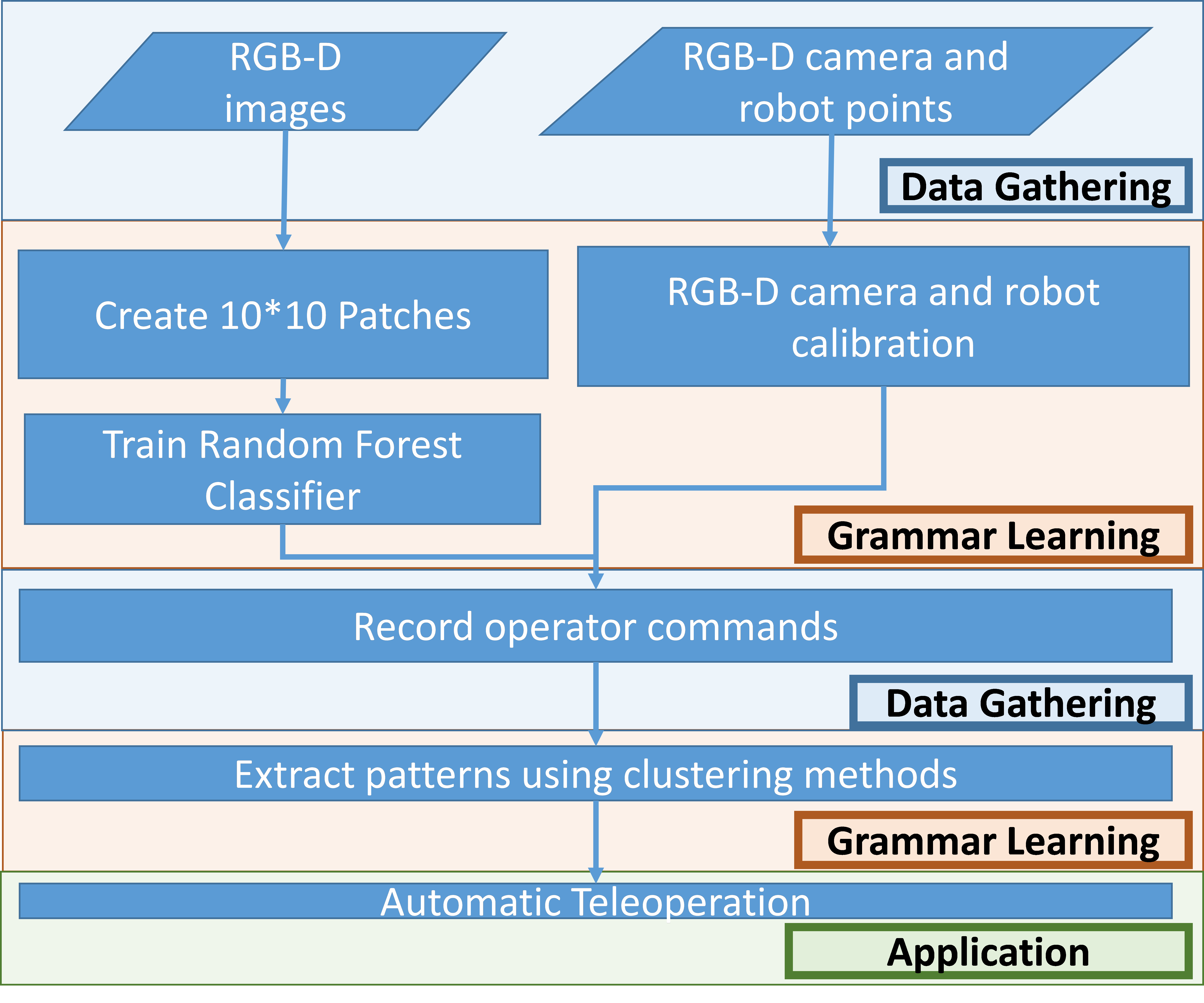
Despite their popularity, the research on teleoperation systems have a number of unsolved problems. Two of the main promlems are, (i) Due to the limited data transfer rates between the local and remote sides substantial time delays may occur and the operators might find these systems difficult to operate. (ii) Second, the interactions between the operator and the system are usually regarded as unnatural since the operator and the robot does not have similar anatomy. In order to address these problems, researchers mostly upgraded the interaction between the system and the operator to a more abstract level. Using higher level programming languages or even natural languages were some of the proposed solutions. Other types of solutions included learning from demonstrations (LfD) techniques. With LfD, the operator shows how a task is performed to the robot and the system learns the task. LfD is regarded as a supervised learning method. It has many advantages but the need for a supervisor is one drawback of this method. The project proposed introduces an unsupervised LfD method for teleoperation. It is expected that the unsupervised learning system will be more useful and flexible because it does not require the operator to act as a supervisor. The planned system asks the operator to perform a classical teleoperation task and it observes the commands issued by the operator. At the same time, the system makes an automatic analysis of the visual data of the scene. The system learns the grammar rules of the most frequently performed operations. These grammar rules are later offered to the operators when they are applicable, which moves the interaction level between the operator and the system to a higher level. The proposed system seems difficult to realize but recent development in grammar learning and visual scene parsing will make the proposed ideas applicable. New techniques especially from the field of computer vision will be very useful in learning grammars in an unstructured environments.
In order to make the operators feel themselves in a more natural environment, we will use active 3D cameras to gather 3D scenne information from the robot site. This information will be used for a realistic 3D reconstruction of the environment. We will also track the head positions of the operators to produce virtual scene images from the point of view of the operator, which will increase the operator depth perception.
The proposed project will concentrate mostly on human-system interaction, machine learning, 3D visual data analysis , hence the outputs of our project might not contain any novelties on control theory. We will build a testing site at the Department of Computer Engineering of Gebze Institute of Technology. Our laboratories already include almost all of the required equipment for this project which include robot arms, haptic control arms, 3D and 2D video cameras, position trackers, and lighting equipment. The initial system experiments will include tasks for moving and manipulating solid blocks from one positions to another. We will also look into using the resulting system in disaster search and rescue operations.
Publications
- Samil Karahan,Yakup Genc, Yusuf Sinan Akgul, "A New 3D Line of Gaze Estimation Method with Simple Marked Targets and Glasses", 3rd International Workshop on Pervasive Eye Tracking and Mobile Eye-Based Interaction, ECEM, Lund, August 2013.
- Abdullah Akay and Yusuf Sinan Akgul, "3D Reconstruction with Mirrors and RGB-D Cameras", 9th International Conference on Computer Vision Theory and Applications (VISAPP), Lisbon, January 2014.